Nueva era para los robots con patas
Tradicionalmente, los robots con ruedas han tenido mucha más presencia y relevancia que los robots con patas. La movilidad de los primeros es más limitada pero se beneficia de un diseño más simple. La locomoción mediante patas es mejor que la basada en ruedas en muchos aspectos y para muchas aplicaciones, pero emular lo que ha logrado la naturaleza tras millones de años de evolución es difícil, por lo que los robots con patas han tenido que afrontar muchos retos tecnológicos y su presencia fuera del laboratorio es modesta. Un avance tecnológico reciente puede contribuir a cambiar drásticamente el papel de los robots con patas en nuestra sociedad.
Unos robotistas de la Universidad de California en la ciudad estadounidense de San Diego han desarrollado pies flexibles que pueden ayudar a los robots con patas a caminar hasta un 40 por ciento más rápido en terrenos irregulares como los cubiertos de guijarros o de trocitos de madera. Esta innovación tendrá aplicaciones prácticas para misiones de búsqueda y rescate, así como para la exploración espacial.
«Los robots necesitan ser capaces de caminar rápida y eficientemente sobre terreno natural y desigual para poder ir a todos los lugares donde los humanos podemos ir», recalca Emily Lathrop, coautora de la investigación que ha desembocado en la validación de esta innovación tecnológica.
Normalmente, los robots con patas solo son capaces de controlar el movimiento en articulaciones específicas. Lo que el equipo de Lathrop y Michael T. Tolley ha hecho es demostrar que un robot con patas que pueda controlar la rigidez de sus pies, y por tanto la forma de estos, supera los diseños tradicionales y es capaz de adaptarse a una amplia gama de terrenos.
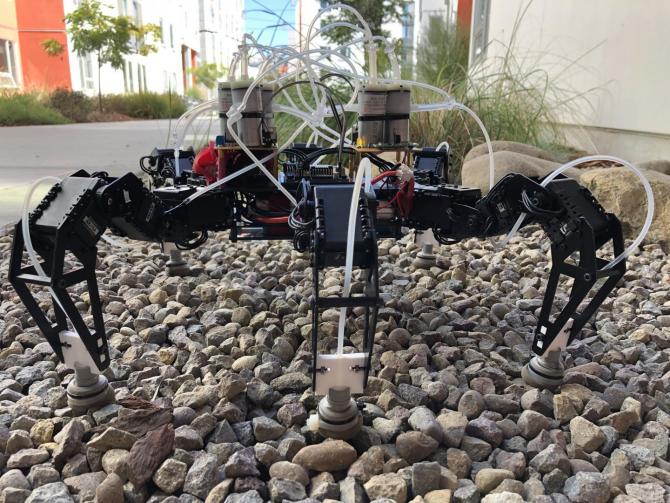
Los pies, en su versión actual de prototipo, son esferas flexibles hechas de una membrana de látex rellena de posos de café.
Los nuevos pies permiten a los robots caminar más rápido y afianzarse mejor al terreno gracias a un mecanismo que permite a un medio granular alternar su conducta entre la típica de un líquido y la que es habitual en un sólido. Cuando los pies entran en contacto con el suelo, se afianzan bien a este y proporcionan una base firme de sustentación al robot. Para levantar los pies del terreno, el agarre de estos al suelo se afloja y permanece así hasta que los pies vuelven a entrar en contacto con él.
Es la primera vez que estos pies se prueban en terreno irregular.
Durante los experimentos, los pies se instalaron en un robot de 6 patas disponible en el mercado.
Los investigadores probaron al robot haciéndolo caminar sobre terreno plano, trocitos de madera y guijarros, con y sin los nuevos pies. Las mejoras aportadas por los nuevos pies fueron particularmente significativas cuando el robot caminaba sobre terrenos inclinados y desiguales. (Fuente: NCYT Amazings)