Manos robóticas casi humanas
¿Necesitas un robot con un toque suave? Un equipo de ingenieros de la Universidad Estatal de Michigan ha diseñado y desarrollado una novedosa mano humanoide que puede ayudar.
En los entornos industriales, los robots se utilizan a menudo para tareas que requieren el agarre y la manipulación repetitiva de objetos. El extremo de un robot en el que se encontraría una mano humana se conoce como pinza.
«Nuestro novedoso diseño de mano humanoide es una pinza híbrida flexible y suave. Puede generar una mayor fuerza de agarre que una mano suave pura tradicional y, simultáneamente, ser más estable para una manipulación más precisa que otros homólogos utilizados para objetos más pesados», dijo el autor principal Changyong Cao, director del Laboratorio de Máquinas Blandas y Electrónica de la MSU y profesor adjunto de Embalaje, Ingeniería Mecánica e Ingeniería Eléctrica y Computacional. Su nueva investigación se publicó en la revista Soft Robotics.
En general, las manos blandas – que se utilizan principalmente en entornos en los que un objeto puede ser frágil, ligero y de forma irregular – presentan varias desventajas: superficies afiladas, poca estabilidad al agarrar cargas desequilibradas y una fuerza de agarre relativamente débil para manejar cargas pesadas.
Al diseñar el nuevo modelo, Cao y su equipo tuvieron en cuenta una serie de interacciones entre el hombre y el medio ambiente, desde la recolección de frutas hasta la atención médica sensible. Identificaron que algunos procesos requieren una interacción segura pero firme con objetos frágiles; la mayoría de los sistemas de agarre existentes no son adecuados para estos fines.
El equipo explicó que la novedad del diseño dio lugar a un prototipo que demuestra los méritos de una pinza de agarre sensible, rápida y ligera, capaz de manejar una multitud de tareas que tradicionalmente requerían diferentes tipos de sistemas de agarre.
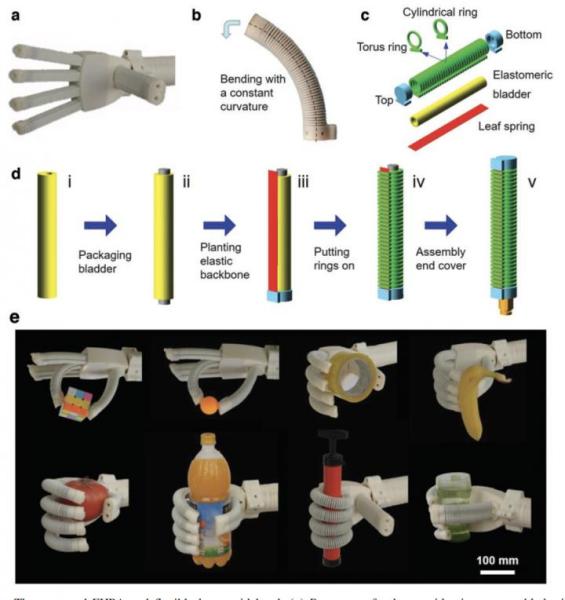
Cada dedo de la suave mano humanoide está construido a partir de un actuador neumático híbrido flexible – o FHPA – que emplea aire presurizado para doblarse, creando un marco modular para el movimiento en el que cada dígito se mueve independientemente de los demás.
«Las pinzas rígidas tradicionales para aplicaciones industriales están generalmente hechas de estructuras rígidas sencillas pero fiables que ayudan a generar grandes fuerzas, alta precisión y repetibilidad», dijo Cao. «La mano humanoide blanda propuesta ha demostrado una excelente adaptabilidad y compatibilidad para agarrar objetos de formas complejas y frágiles, manteniendo al mismo tiempo un alto nivel de rigidez para ejercer fuertes fuerzas de sujeción para levantar cargas pesadas».
En esencia, lo mejor de ambos mundos, explicó Cao. El FHPA está compuesto de componentes duros y blandos. «Combinan las ventajas de la deformabilidad, adaptabilidad, etc., de las pinzas blandas, a la vez que mantienen la gran fuerza originada por la rigidez del actuador», dijo Cao.
Cree que el prototipo puede ser útil en industrias como la recogida de fruta, el empaquetado automatizado, la atención médica, la rehabilitación y la robótica quirúrgica.
Con un amplio margen para la investigación y el desarrollo futuros, el equipo espera combinar sus avances con el reciente trabajo de Cao sobre las llamadas pinzas «inteligentes», integrando sensores impresos en el material de agarre. Y al combinar la pinza híbrida con modelos de «brazos suaves», los investigadores podrán imitar con mayor precisión las acciones humanas precisas. (Fuente: NCYT Amazings)