Mano robótica tan hábil como la humana para sostener objetos
Objetos como un bolígrafo con el que se pretenda escribir, o un huevo que no queramos romper antes de lo previsto, deben ser sostenidos de maneras específicas y aplicando una cantidad de fuerza también específica. Los humanos podemos hacerlo con bastante facilidad mediante nuestras manos. No ha sido fácil lograr lo mismo con las manos de los robots, y ello ha venido acompañado habitualmente de soluciones caras y aparatosas. Ahora, una nueva mano robótica promete revolucionar este campo.
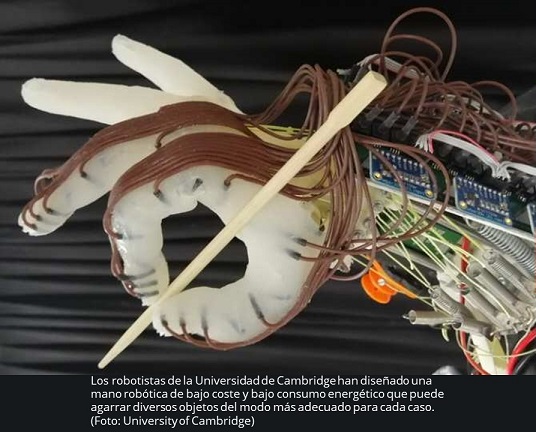
Kieran Gilday, Thomas George-Thuruthel y Fumiya Iida, los tres de la Universidad de Cambridge en el Reino Unido, han diseñado una mano robótica de bajo coste y bajo consumo energético que puede agarrar objetos de muy diversas clases, sin dañarlos por presionarlos demasiado o por soltarlos indebidamente. Para ello, ha resultado fundamental la capacidad de la mano para realizar movimientos de muñeca y la sensibilidad de su «piel».
La nueva mano robótica tiene un exterior blando, está fabricada por impresión 3D y aunque no puede mover los dedos de forma independiente, sí puede realizar una serie vital de movimientos complejos.
Por sus características, la mano robótica es mucho más fácil de controlar y mucho más eficiente energéticamente que los robots con dedos plenamente motorizados.
Los creadores de la nueva mano robótica piensan que su diseño adaptable podría utilizarse en el desarrollo de robots de bajo coste capaces de ejecutar movimientos más naturales y de aprender a agarrar una amplia gama de objetos.
Gilday, George-Thuruthel y Iida exponen los detalles técnicos de su mano robótica en la revista académica Advanced Intelligent Systems, bajo el título “Predictive Learning of Error Recovery with a Sensorised Passivity-based Soft Anthropomorphic Hand”. (Fuente: NCYT de Amazings)