Prótesis con inteligencia artificial
Aunque los avances en robótica vestible han ayudado a recuperar la movilidad de las personas con discapacidades en las extremidades inferiores, los métodos actuales de control de los exoesqueletos son limitados en cuanto a su capacidad para proporcionar movimientos naturales e intuitivos a los usuarios. Esto puede comprometer el equilibrio y contribuir a la fatiga y la incomodidad del usuario. Pocos estudios se han centrado en el desarrollo de sistemas de control que puedan optimizar el servicio prestado al usuario en términos de seguridad e independencia.
Los exoesqueletos existentes para la rehabilitación de miembros inferiores emplean diversas tecnologías para ayudar al usuario a mantener el equilibrio, como muletas especiales y sensores. Los exoesqueletos que funcionan sin estas ayudas permiten caminar de forma más independiente, pero a costa de aumentar el peso y reducir la velocidad de la marcha.
Unos investigadores han desarrollado un nuevo sistema para controlar exoesqueletos de extremidades inferiores utilizando una modalidad de inteligencia artificial denominada aprendizaje por refuerzo profundo. El nuevo sistema permite un control de la marcha más eficaz y más natural para los usuarios de exoesqueletos de extremidades inferiores, todo ello sin incrementar excesivamente el peso del exoesqueleto.
Este nuevo sistema lo ha ideado un equipo integrado, entre otros, por Shuzhen Luo y Xianlian Zhou, del Instituto Tecnológico de New Jersey en Estados Unidos, así como Ghaith Androwis, de la Fundación Kessler en Estados Unidos.
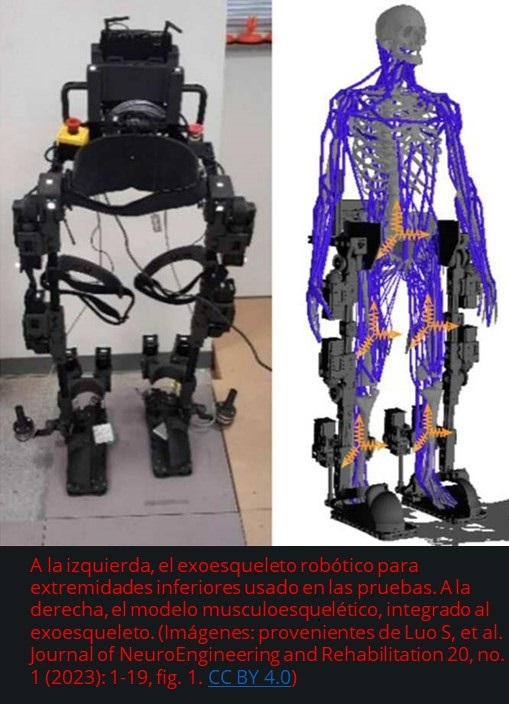
Utilizando un modelo musculoesquelético acoplado a un exoesqueleto, Luo y sus colegas simularon los movimientos de una extremidad inferior y entrenaron al sistema de control del exoesqueleto para conseguir patrones de marcha naturales, utilizando el aprendizaje por refuerzo profundo.
El equipo está probando ahora el sistema en condiciones reales con un exoesqueleto de extremidades inferiores.
Luo y sus colegas exponen los detalles técnicos de su nuevo sistema de control para exoesqueletos en la revista académica Journal of NeuroEngineering and Rehabilitation, bajo el título “Robust walking control of a lower limb rehabilitation exoskeleton coupled with a musculoskeletal model via deep reinforcement learning”. (Fuente: NCYT de Amazings)