Hacia robots industriales más versátiles en sus interacciones con humanos
A fin de evitar el riesgo de que un robot industrial golpee a una persona que se interponga en su trayectoria, es común dotar a tales robots de la capacidad de detectar la cercanía de personas. Pero en tal caso la reacción típica de los robots industriales es detenerse por completo, algo que en la mayoría de las ocasiones un trabajador humano que estuviera en el puesto del robot no necesitaría hacer, ya que le bastaría con vigilar los movimientos de la otra persona y realizar los suyos propios de un modo que le garantice no chocar con ella.
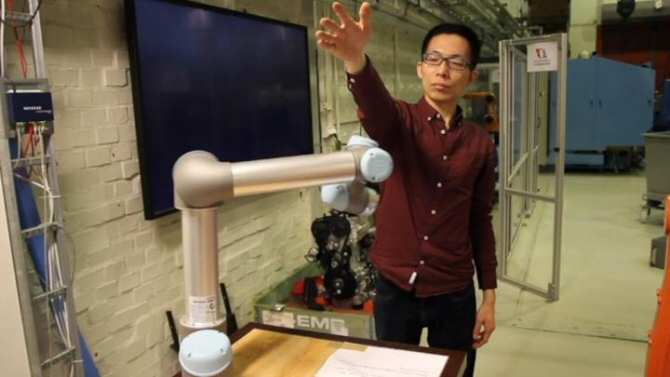
Ahora se ha diseñado un nuevo sistema que puede dotar a los robots industriales de esa flexibilidad a la hora de moverse cuando alguien está cerca. Con este sistema, se seguirá respetando la seguridad de los humanos pero al mismo tiempo se evitarán interrupciones innecesarias en la cadena de montaje y el trabajo conjunto de humanos y robots será más eficiente.
En vez de analizar únicamente la distancia entre él y sus compañeros humanos, el nuevo sistema le permite al robot identificar a cada persona con la que trabaja y otros detalles de su cuerpo. Con esta información, el sistema puede reconocer la postura del trabajador e incluso predecir la siguiente postura que adoptará, siguiendo criterios lógicos.
De este modo, en vez de detenerse por completo, el robot cambia su trayectoria, se mueve despacio en el momento de máxima cercanía al humano y prosigue su trabajo, tal como haría otra persona. Por ejemplo, si el humano interpone su brazo y el robot tiene espacio para moverse más abajo, se agacha y pasa por ahí.
Este sistema es obra de Hongyi Liu y Lihui Wang, del Real Instituto de Tecnología (KTH) de Estocolmo en Suecia.
El sistema funciona a base de una modalidad de inteligencia artificial denominada “aprendizaje por transferencia”, gracias a la cual la potencia de cálculo que necesita es menor y los conjuntos de datos que requiere son más pequeños, en comparación con los métodos tradicionales de aprendizaje automático.
Liu y Wang exponen los detalles de esta innovación en la revista académica Robotics and Computer-Integrated Manufacturing con el título de “Collision-free human-robot collaboration based on context awareness”. (Fuente: NCYT de Amazings)