Robots con destreza manual como la humana para realizar todo tipo de trabajos
Para los próximos años y décadas, la NASA planea enviar tripulaciones humanas de vuelta a la Luna, construir una estación espacial en órbita lunar, establecer una base permanente en la superficie lunar y, si todo va bien, enviar astronautas a Marte.
Para estas misiones se necesitarán robots que realicen los trabajos más duros o peligrosos y que ayuden a los astronautas humanos en otras tareas.
La NASA trabaja en nuevas ideas de diseño para tales robots, y a tal fin cuenta con la colaboración de varias entidades, entre ellas la Escuela John A. Paulson de Ingeniería y Ciencias Aplicadas (SEAS) de la Universidad Harvard en Estados Unidos.
Desde 2019, el equipo de Justin Werfe, de la SEAS, está desarrollando tecnologías para lograr robots autónomos que reparen o sustituyan componentes dañados en una nave espacial o en una base de otro mundo, y realicen otras muchas tareas.
Un avance decisivo que ha logrado este equipo es una nueva clase de brazos robóticos, equipados con “manos” cuya destreza manual, parecida a la humana, las capacita para realizar todo tipo de trabajos.
Uno de los mayores retos a la hora de diseñar robots para esas futuras misiones espaciales es la multifuncionalidad necesaria. La mayoría de los robots industriales, como los que se utilizan para fabricar coches, están muy especializados y solo realizan unas pocas tareas específicas. Pero difícilmente una nave espacial o una base en otro mundo tendrán espacio suficiente para albergar docenas de robots especializados. En vez de eso, deberán bastar un solo robot o unos pocos, que sean capaces de realizar muchas tareas diferentes, incluidas reparaciones de emergencia.
Un requisito imprescindible para lograr robots así es que sean capaces de coger, sostener y manipular todo tipo de objetos.
Las manos humanas pueden adaptarse a muchas funciones, incluidas las que requieren una gran precisión, las que exigen aplicar una gran fuerza o las que necesitan una sujeción lo más leve posible para evitar romper el objeto agarrado. El nuevo enfoque de diseño seguido por Werfe y sus colegas busca conseguir esa versatilidad de la mano humana.
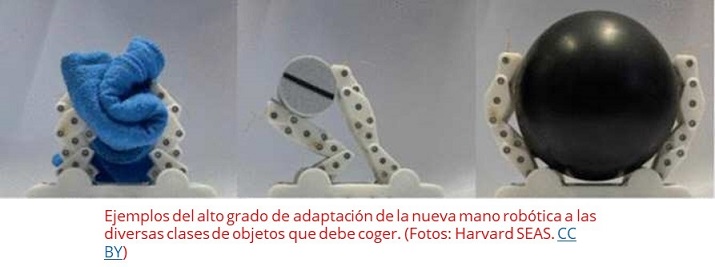
El último avance logrado por el equipo, para el que ha contado con la ayuda de expertos de la Universidad Nacional de Busan en Corea del Sur, consiste en una mano con dedos que pueden ser reconfigurados para cambiar la cantidad de articulaciones del dedo.
La nueva mano robótica tiene tres configuraciones generales. En la primera, los dedos son cortos y no se doblan, lo que les permite agarrar objetos con fuerza y seguridad. En la segunda configuración, los dedos ganan una articulación para permitir a la mano manipular objetos, capacitándola para moverlos y girarlos sin soltarlos. La última configuración añade dos articulaciones más, lo que permite a los dedos adaptarse pasivamente a la forma de un objeto y distribuir la presión de contacto, lo que resulta útil para agarrar objetos cuya forma es irregular o que son delicados y podrían romperse o abollarse con una presión excesiva. (Fuente: NCYT de Amazings)